| zurück |
Vorwort vom Nov. 2008:
Inzwischen gibt es die MoBaSbS in der Version 4 !!!
Hier zeige ich noch die MoBaSbS im Aufbauzustand und mit den Bezeichnungen der
Version 2 !!!
Meine hier beschriebene Steuerung ist eine der ersten aufgebauten. Und schon mit
dieser konnte meine
große Modellbahn unglaublich zuverlässig betrieben werden. Ich fahre auch heute
noch mit den alten
Platinensätzen. Diese wurden inzwischen in der Soft- und Hardware natürlich
kontinuierlich verbessert.
Es gibt auch inzwischen industriell gefertigte Platinen vom Allerfeinsten, und
und... Die MoBaSbS ist
richtig professionell geworden.
Ich überarbeite das unten geschriebene aus diesem Gründen nicht. Das Prinzip
bleibt ja bestehen und ich
möchte euch nur auf den Geschmack bringen. In dem weiterführenden Link ca. in
der Mitte geht es zur Site
von Patrick Urban, wo ihr ständig den neuesten Input saugen könnt und wo alles
bis ins allerkleinste Detail
beschrieben ist.
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
Die Modellbahnselbstbausteuerung MoBaSbS V2
Meine Modellbahn habe ich bis zum Jahreswechsel
Märklin Motorola Protokoll mit Intellibox für die Lok- und
Weichensteuerung, sowie mit einem HSI-
Als Rechner dient mir ein
Notebook 350 Mhz Pentium II mit
Windows 98 SE. Die Software zum Steuern der Anlage ist
Railroad&Co 4.7. (Mittler
Weile habe ich Anfang 2004
wegen zu langsamen Bildaufbauten beim Umschalten
zwischen den
Gleisbildstellwerken in Railroad&Co Version 5.0 auf einen
schnelleren Rechner
gewechselt, 2,5 Ghz Pentium III mit Windows
XP = das hat
aber nichts mit den eigentlichen Problemen zu tun, hat nur eher "kosmetische"
Gründe)
Nun dachte ich immer : Eigentlich
eine ganz gute Zusammenstellung,
da über einen seriellen Port des
Rechners die Befehle zur Anlage hin gehen und
über einen zweiten seriellen Port
die Befehle
von der Anlage
zurückkommen.
Aber eben nur "ganz gut", wenn da nicht
diese merkwürdigen und nicht nachvollziehbaren Verzögerungen in der
Datenverarbeitung
gewesen wären =
Belegtmeldungen von den realen
Kontaktmeldern wurden zu spät abgearbeitet.
Dies wiederum führte bei mir über
lange Zeit zu Unfällen und Schäden an
meinem Rollmaterial, da die Züge
sporadisch, also hin-
und wieder bis in
ihre
kommenden Ausfahrweichenstrassen
fuhren, und dann erst bremsten. Ein
ausfahrender Zug fuhr ihm dann
in die
Flanke. Vor allem, wenn mehr
als
einen Wecker danach
stellen, geschweige denn,
den Raum mal mit
ruhigem Gewissen für kurze Zeit
verlassen. Genau dann
passierte es nämlich ganz besondern "gern".
Angestoßen durch eine Diskussion im Intellibox- und ganz
besonders im Railroad&Co-Forum
wurde mir klar, dass
diese
Verzögerungen ihre Ursache in der Datenaufbereitung des Motorola-Protokolls der
IB haben könnten.
Uhlenbrock, als
Hersteller
der IB, kennt wohl
schon länger dieses
Problem, hat es aber bis heute nicht gelöst. Die Intellibox scheint
sich
sozusagen selbst zu
verstopfen, wenn sie
mehr als 3 Lokomotiven gleichzeitig bremst und
beschleunigt.
Und genauso war es auch bei mir:
beschleunigten und / oder bremsten mehr als _drei Loks gleichzeitig_ passierte
es. Und noch
ungenauer wurde
der
Bremsweg, wenn virtuelle Kontakte mitspielten und auch noch berechnet und umgesetzt werden mussten.
Dann
ging es
soweit, das eine zu
bremsende
Lok mindestens 50 - 60cm zu weit
fuhr und erst in der Ausfahrweichenstrasse zum
Stehen kam!
Da ich es leid war, nervenaufreibende Zugfahrten
durchzuführen, deren Ende immer in irgendwelchen Unfällen mündeten,
habe ich
mit
drei
weiteren
MoBa- Kollegen nach einer besseren Lösung gesucht. Dabei sind wir
auf die MoBaSbS- Steuerung
von Patrick Urban
aufmerksam
geworden und
nach einigen
Emails stand unser Entschluss fest, diese Steuerung nachzubauen.
Dieser Schritt war der einzig richtige aus heutiger
Sicht.
Denn jetzt, nach der Inbetriebnahme, hat es ein Ende mit all den
Verzögerungsproblemen.
Meine Züge halten jetzt da, wo sie sollen,
und ich habe
seit dem keinen weiteren Crash mehr zu verzeichnen gehabt. Es
macht einfach nur Spaß, ganz
entspannt den Zugfahrten
zu folgen.
Der Deutlichkeit halber möchte ich aber noch mal sagen, es
handelt sich um eine SELBSTBAUSTEUERUNG. Also, wie der Name schon
sagt,
muss
sie
in eigener Regie gebaut werden. Der Patrick hat sie eigentlich seinerzeit nur
für sich selbst erstellt, und will sie nicht
kommerziell nutzen.
Er stellt aber
alle Platinenlayouts, die benötigten Bauteile und was es sonst noch zu wissen
gilt, auf seiner Site
zur Verfügung.
Wenn ihr mehr zu dieser Steuerung
wissen
wollt, besucht doch mal die Homepage von
Patrick:
http://www.macurb.de
oder auf
![]()
Damit man einen Eindruck von dieser Steuerung
gewinnen kann zeige ich einige Bilder dazu.
zum vergrößern einfach
draufklicken !!!
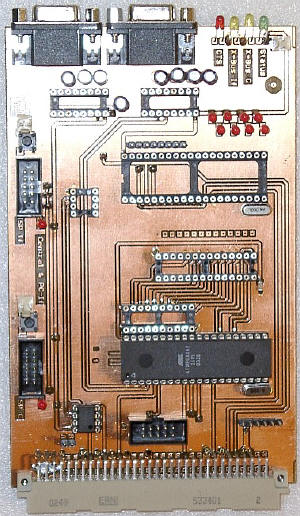 Die MoBaSbS "Zentrale".
Die MoBaSbS "Zentrale".
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
 Diese
Platine beinhaltet den
Datengenerator,
der aus den PC-Daten das Motorola-Protokoll generiert.
Diese
Platine beinhaltet den
Datengenerator,
der aus den PC-Daten das Motorola-Protokoll generiert.
An der vorderen Sub-D
Buchse
wird der
Booster angeschlossen. An die übrigen drei vorderen
Buchsen kann
je ein Handregler angeschlossen werden.
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
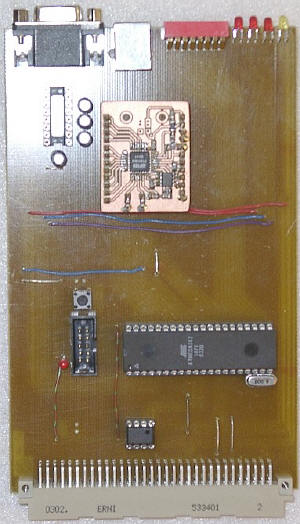
HIGHLIGHT : PC- USB/RS232 Interface. Diese Platine macht die MoBaSbS zur Steuerung mit USB Anschluss
zum PC !!!
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
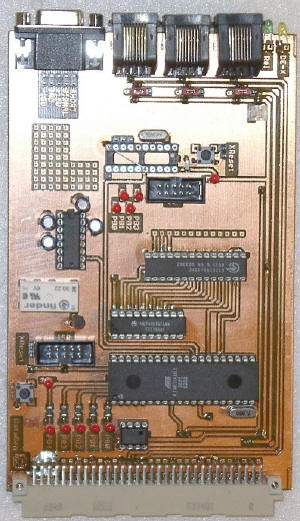
Dies ist der Weichengenerator "USC".
Dieser ermöglicht das Stellen von
Weichen über die MoBaSbS unter
Märklin Motorola.
Diese Komponente gehört seit dem 01.01.2009

| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
Natürlich braucht das ganze auch ein
Netzteil.
Dieses ist ein einfaches
Seit Anfang 2008
nutze ich allerdings ein PC Netzteil, weil der HDC (Handregler, siehe nächsten
Posten) 12 Volt
benötigt und weil ich seit dem auch die
gesamte MöBaSbS mit 12 Volt versorge (wird je Platine mit Festspannungs-
reglern
dann auf 5 Volt gebracht) Außerdem hat man so auch
bei den Peripheriemodulen (Decodern + Encodern)
an entfernten Punkten
Spannungsreserven. Wenn von den 12 Volt nur 11 oder 10 Volt
an dem letzten Modul
ankommen reicht das immer die benötigen 5 Volt für eine
Platine bereit zu stellen.

| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |

Ein weiteres Sahnehäubchen
dieser Steuerung ist das von Patrick
entwickelte Fahrpult "HDC"
Hiermit
lässt sich sehr
komfortabel die Anlage auch von Hand steuern. Man kann nicht nur
die Adresse
der
Lok
ablesen, sondern auch ihre Bezeichnung in Form von Zahlen oder Buchstaben
!!! Man
sieht also
mit einem Blick, das man es beispielsweise mit einem EC Zug
adressiert mit
03 zu tun hat. Das Display hat natürlich eine Hintergrundbeleuchtung, so dass man alle
Daten auch im
Dunklen im Blick hat. Nach dem Einschalten der Anlage meldet
der
Handregler
sich ganz galant mit Namen ☺☺☺
Nach Aufrufen der ersten Lok wird diese
im Display mit
der passenden Adresse genannt.
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |

Abschließend noch ein Bild von dem Gesamtaufbau auf
einer Backplane
für meine Tests (im Bild die grüne unten rechts)
Hierauf
werden die aufgesteckten
Steuerungsplatinen miteinander
verbunden.
Natürlich wird das Ganze noch in ein
passendes
Gehäuse eingebaut, so dass auch
ein professionelles
Aussehen gewährleistet
ist.
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
Resümee :
Alles in allem kann ich sagen, dies war
die einzig richtige Entscheidung. Mir ist zur Zeit keine auf dem Markt
befindliche
Steuerung
bekannt, die mit einem so modularen Konzept, und vor allem
so präzise, die Steuerungsbedürfnisse eines
jeden Motorola und auch DCC Modellbahnfahrers
abdeckt. Noch ein riesiger Vorteil übrigens : Im Zusammenhang mit der
Steuerungssoftware und IB-Box fuhren rückwärts in Blöcken abgestellte Loks (also
nicht in Vorzugsfahrtrichtung stehende)
am nächsten Tage nach Neuinitialisierung
der Anlage
falsch rum ! Auch dieses Ärgernis gehört mit der MoBaSbS der
Vergangenheit an.
![]() ab 01.01.2008 läuft auch die Rückmeldung (S 88 Bus) über die MoBaSbS. Zwecks
dessen habe ich mir auch einen
ab 01.01.2008 läuft auch die Rückmeldung (S 88 Bus) über die MoBaSbS. Zwecks
dessen habe ich mir auch einen
Peripheriemodulcontroller "PMC" gebaut, welcher die Verwaltung dazu übernimmt
und einen ganzen Stapel an
Rückmeldemodulen.
![]() ab dem 01.01.2009 schalte ich auch meine Lichtsignale mit eigens für die MoBaSbS
entwickelten Decodern,
ab dem 01.01.2009 schalte ich auch meine Lichtsignale mit eigens für die MoBaSbS
entwickelten Decodern,
als da wären für die Lichtsignale der " LDEC" und für die Weichen der "FET"
Decoder über den "PMC"
Dazu brauchte ich mir jetzt _nur_ noch die Decoder bauen ,--))
Meine Hoffmann Weichenantriebe schalten jetzt übrigens einwandfrei und
absolut ohne Probleme ganz stramm durch ,--))
Beide Decodertypen werden mit Fremdeinspeisung a) beim FET zum schalten
der Weichenantriebe und b) zum beleuchten
der LED an den Lichtsignalen bedient. Dazu nutze ich übrigens ein
Notebooknetzteil für klitzekleine 14 Euro welches
geregelte stabile 18,5 Volt 3,5A ausgibt. Der FET gibt jetzt den Antrieben
die 18,5 Volt, das läuft und schaltet jetzt, das
es nur eine Freude ist. Auch die Schaltprobleme mit den Viessmann
Formsignalen sind vorbei. auch die ziehen richtig gut
durch, im Gegensatz zu früher und über den Märklin K83.
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
Die Produktion vom Lichtsignaldecoder
"LDEC" ist aufgenommen. Da ich vorbildgerecht mit Dunkeltastung
am
Vorsignal
fahren will benötige ich nach jetzigem Stand 31 Stück. An dieser Stelle möchte
ich mal erwähnen,
das so ein Decoder
komplett gebaut, also inklusive der industriell gefertigten und über Patrick
bezogenen
Platine, etwas unter 9 Euro kostet,
wenn man den vorgesehen SN als Transciever nutzt und etwas über 10 Euro,
wenn
man den MAX 485 nimmt. Ich meine
jedenfalls das ist absolut nicht zu teuer ...


Die ersten drei von 33 LDEC
Lichtsignaldecodern (2 als Reserve für später, man weiß ja nie ,--)) ) sitzen
schon

| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
| zurück | |
| nach oben |